
數(shù)控雕銑機(jī)床的原點(diǎn)與極限位置控制模塊
每個軸的步進(jìn)電機(jī)都必須在一定的安全范圍之內(nèi)運(yùn)行,所以在每個支撐導(dǎo)軌的兩端均安裝一個限位傳感器。限位傳感器是由光電傳感器以及輔助電路構(gòu)成,其基本原理是當(dāng)數(shù)控雕銑機(jī)床在某個軸上移動時,安裝在該軸上的擋光板將會在光電傳感器的發(fā)光端和接收端之間移動。根據(jù)數(shù)控雕銑機(jī)床工作臺移動距離設(shè)定軸上兩端的極限位置,當(dāng)擋光板隨工作臺移動到極限位置時,光電傳感器的輸出電平將發(fā)生變化,DSP檢測到電平變化后,停止發(fā)送步進(jìn)電機(jī)脈沖信號并發(fā)出限位報(bào)警信號,。下圖是一個軸的正限位傳感器信號處理電路,傳感器信號經(jīng)比較器LM339,與參考電壓Verf比較,高于Vref則輸出高電平,反之輸出低電平(為極限點(diǎn)位置),輸出低電平時傳感器工作指示燈D1點(diǎn)亮。開關(guān)信號經(jīng)6N137隔離降壓后送F24O7A的I/O口檢測,若超出極限范圍,則電機(jī)停轉(zhuǎn),同時發(fā)出報(bào)警指示信號,。為了給運(yùn)動坐標(biāo)進(jìn)行標(biāo)定,在每個軸上都設(shè)置一個原點(diǎn)位置,并在此處安裝了一個位置傳感器,每個軸的運(yùn)動坐標(biāo)都以該點(diǎn)為基準(zhǔn),原理與限位傳感器相同,。
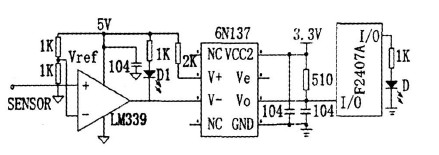
數(shù)控雕銑機(jī)床限位控制模塊電路圖
相關(guān)資訊
- 高速數(shù)控雕銑機(jī)在使用中要做好哪些工作?
- 從機(jī)械角度區(qū)別和選擇
- 多功能高速雕銑機(jī)性能指標(biāo)
- 數(shù)控雕銑機(jī)cnc系統(tǒng)軟件的結(jié)構(gòu)
- 國產(chǎn)數(shù)控雕銑機(jī)到底要多少錢一臺?
- cnc雕銑機(jī)控制系統(tǒng)的選擇
- 數(shù)控雕銑機(jī)是雕刻機(jī)成功“蛻變”的典型代表,!
- 為什么數(shù)控龍門銑會出現(xiàn)絲錐斷裂現(xiàn)象,?
- 電腦雕刻機(jī)對刀裝置的電路設(shè)計(jì)
- 數(shù)控雕銑機(jī)市場的迅速崛起給電主軸企業(yè)帶來了良好的發(fā)展機(jī)遇
推薦產(chǎn)品

高速高精雕銑機(jī)YF-G870 該型號設(shè)備秉承了以往機(jī)型小刀具加工特點(diǎn)的基礎(chǔ)上,,結(jié)合目前模具切削加工的實(shí)際情況,采用加重型和增強(qiáng)型的光機(jī),,高精密度的線性導(dǎo)軌和滾珠絲桿,,再配套大功率的主軸和伺服電機(jī),使之成為既可用于中小批量的精密零件生產(chǎn),,更可實(shí)現(xiàn)大重型的精密模具加工,。其所

高速雕銑機(jī)YF-D870 本款型號設(shè)備秉承了傳統(tǒng)機(jī)床小刀具加工特點(diǎn)的基礎(chǔ)上,結(jié)合目前模具切削加工的實(shí)際情況,,采用加重型和增強(qiáng)型的光機(jī),,高精密度的線性導(dǎo)軌和滾珠絲桿,再配套大功率的主軸和伺服電機(jī),,使之成為既可用于中小批量的精密零件生產(chǎn),,更可實(shí)現(xiàn)大重型的精密模具加工。其

數(shù)控龍門高速銑YF-D1615 該款型號高速銑床是本公司對原有機(jī)型改造創(chuàng)新升級后推出的第一款主打產(chǎn)品,,它結(jié)合了原有的老款數(shù)控銑床的性能特點(diǎn),,更改了有效行程,并不斷的進(jìn)行創(chuàng)新和改良,,才有了這款具有結(jié)構(gòu)合理,、穩(wěn)定性強(qiáng)、精度高,、剛性強(qiáng),、效率高等眾多優(yōu)勢的產(chǎn)品。該款機(jī)型是一帆數(shù)控

龍門數(shù)控高速銑YF-D1311 本型號數(shù)控高速銑床采用合理的結(jié)構(gòu)強(qiáng)度及內(nèi)部加強(qiáng)肋的搭配,,并在橫梁上增加一根X軸向的導(dǎo)軌,,提供機(jī)械之整體的高剛性,增強(qiáng)了在切削加工時的穩(wěn)定性,。再配備高精度的進(jìn)口直線導(dǎo)軌,、絲桿和主軸,使該機(jī)型的性能既可用于雕刻也可以用于雕銑,,同時也起到了特定加
