
數(shù)控雕銑機(jī)行業(yè)專用設(shè)備的的軟件結(jié)構(gòu)及程序流程
系統(tǒng)的軟件選用了嵌入式實(shí)時(shí)多任務(wù)操作系統(tǒng)WindowsCE.net,。根據(jù)數(shù)控雕銑機(jī)控制系統(tǒng)的需求,,系統(tǒng)任務(wù)模塊可以分為:人機(jī)界面模塊,,USB接口模塊和雕刻控制模塊,。其中人機(jī)界面模塊包括LCD顯示和鍵盤指令的讀??;通過USB接口模塊讀取原始設(shè)計(jì)數(shù)據(jù),;雕刻控制模塊對(duì)讀取的數(shù)據(jù)分析計(jì)算后完成速度控制和軌跡控制,。軟件結(jié)構(gòu)圖如圖1所示,。
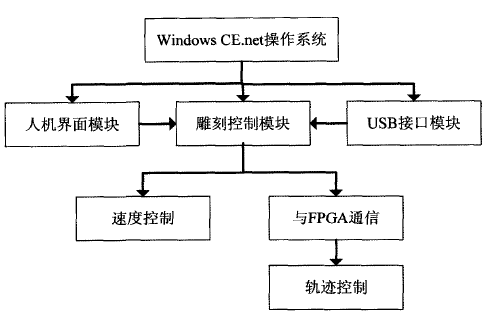
圖1 系統(tǒng)軟件結(jié)構(gòu)圖
控制系統(tǒng)中,,ARM通過對(duì)設(shè)計(jì)數(shù)據(jù)的分析和計(jì)算完成速度控制,F(xiàn)PGA通過插補(bǔ)運(yùn)算完成軌跡控制,??刂葡到y(tǒng)應(yīng)用程序流程圖如圖2所示。
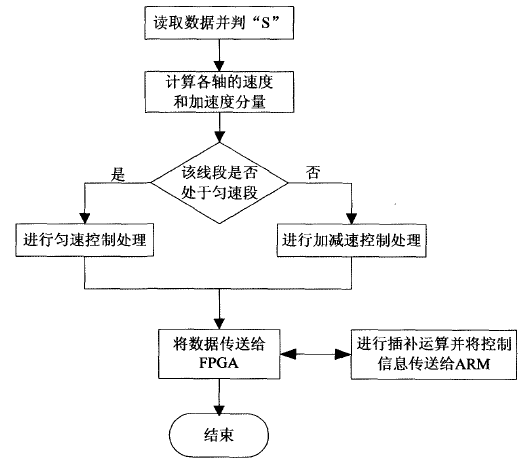
圖2 控制系統(tǒng)應(yīng)用程序流程圖
(1)讀取數(shù)據(jù),,找出可在速度不出現(xiàn)突變的情況下可雕刻的最小單位的線條數(shù),,稱之為判“S”。分別計(jì)算“S”中各軸的位移總量,,定義“Sx”,,“Sy”和“Sz”分別為X,Y和Z軸的位移總量,。
(2)根據(jù)操作設(shè)置的雕刻最大速度和加速度,,計(jì)算出該段位移中各軸的速度分量和加速度分量。
(3)判斷當(dāng)前數(shù)據(jù)處于哪種速度段,,根據(jù)不同的情況計(jì)算各段位移的加速,、勻速,、減速段的脈沖數(shù)和各速度段的初始頻率等這些數(shù)據(jù),并把數(shù)據(jù)發(fā)送給FPGA,。
(4)FPGA根據(jù)接收到的數(shù)據(jù)進(jìn)行插補(bǔ)運(yùn)算,,最終控制步進(jìn)電機(jī)的轉(zhuǎn)速,實(shí)現(xiàn)三軸聯(lián)動(dòng),。
推薦產(chǎn)品

龍門數(shù)控高速銑YF-D1311 本型號(hào)數(shù)控高速銑床采用合理的結(jié)構(gòu)強(qiáng)度及內(nèi)部加強(qiáng)肋的搭配,并在橫梁上增加一根X軸向的導(dǎo)軌,,提供機(jī)械之整體的高剛性,,增強(qiáng)了在切削加工時(shí)的穩(wěn)定性。再配備高精度的進(jìn)口直線導(dǎo)軌,、絲桿和主軸,,使該機(jī)型的性能既可用于雕刻也可以用于雕銑,同時(shí)也起到了特定加

高速數(shù)控龍門銑YF-D2516 該型號(hào)龍門雕銑機(jī)床采用了大型肋骨強(qiáng)化和龍門式大床體設(shè)計(jì),,并經(jīng)過多次實(shí)效處理消除應(yīng)力,,能長(zhǎng)久的保持良好的剛性和精度。該機(jī)型是專為加工大工件所設(shè)計(jì),,其填補(bǔ)了目前市場(chǎng)上普通雕銑機(jī)無法加工大尺寸工件的空白,。其具有的傳動(dòng)平穩(wěn)、剛性高,、機(jī)型重、精度高,、

數(shù)控龍門高速銑YF-D1615 該款型號(hào)高速銑床是本公司對(duì)原有機(jī)型改造創(chuàng)新升級(jí)后推出的第一款主打產(chǎn)品,,它結(jié)合了原有的老款數(shù)控銑床的性能特點(diǎn),更改了有效行程,,并不斷的進(jìn)行創(chuàng)新和改良,,才有了這款具有結(jié)構(gòu)合理、穩(wěn)定性強(qiáng),、精度高,、剛性強(qiáng)、效率高等眾多優(yōu)勢(shì)的產(chǎn)品,。該款機(jī)型是一帆數(shù)控

數(shù)控加工中心YF-C850 此機(jī)型的整體機(jī)械機(jī)構(gòu)采用樹脂砂鑄件制造,,內(nèi)部加強(qiáng)筋加多加大高剛性設(shè)計(jì),加強(qiáng)機(jī)械精度的持久性及加工精度的穩(wěn)定性,,并保證了整體長(zhǎng)久不變形,。該機(jī)型具有自動(dòng)換刀裝置及三軸,、四軸聯(lián)動(dòng)控制功能,系統(tǒng)一次裝夾,, 可自動(dòng)連續(xù)對(duì)四面進(jìn)行銑,、鉆、鉸及絲攻等多種
